Lyapunov stability theory
 Lyapunov function
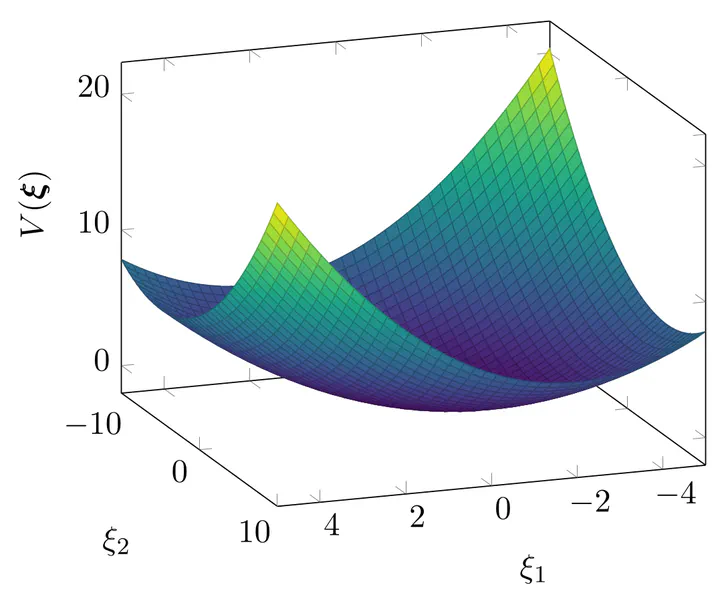
Lyapunov function
This course introduces Lyapunov theory for the stability of nonlinear systems, emphasizing applications to the stability, robustness, and safety of aerial drones. The first part reviews the definitions of stability for autonomous and non-autonomous systems. This part concludes by showing that the stability properties of linear systems no longer apply in the case of nonlinear systems. The second part introduces the concept of Lyapunov theory by presenting the energy concept, then presenting the various theorems and their conditions to demonstrate the stability of nonlinear systems. The part concludes by presenting LaSalle’s invariance principle, which is useful in cases where some of the conditions are not met on Lyapunov functions to demonstrate asymptotic stability. Examples and exercises are provided to apply Lyapunov theory to the stability of aerial systems. The third and final part presents an introduction to input-to-state stability (ISS) to demonstrate the robustness of non-autonomous systems with respect to bounded inputs. This part covers the main definitions and examples to understand the concept of input-to-state stability and the interest of the method for aerial systems.