
Adaptive Tuning of Event-Triggered Control based on Machine Learning: Application to Mobile Robotics
This paper looks at optimizing the frugal navigation of mobile robots by combining event-triggered control with artificial intelligence techniques.
Jul 17, 2025
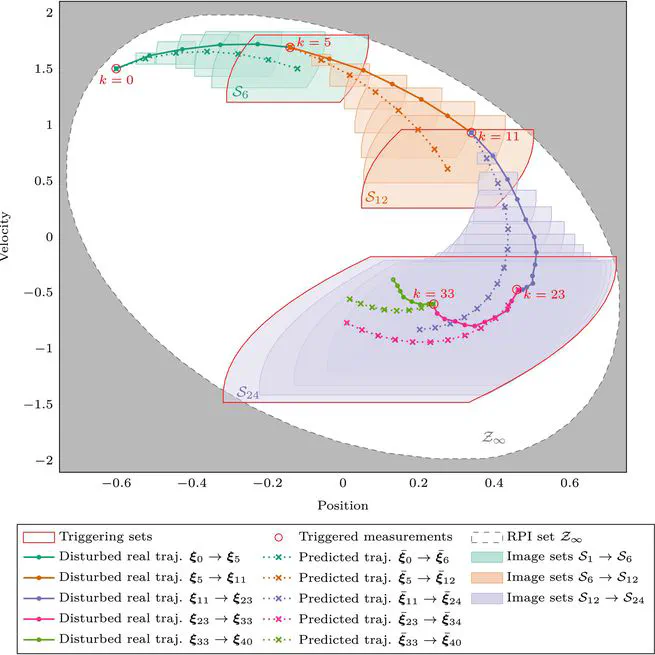
Guaranteed Self-Triggered Control of Disturbed Systems: A Set Invariance Approach
This article introduces a novel self-triggering strategy designed to ensure the control of discrete-time linear systems with guaranteed stability, even in the presence of disturbances and uncertainties.
Jun 3, 2025