Guaranteed Self-Triggered Control of Disturbed Systems: A Set Invariance Approach
Jun 3, 2025·


 ,
,
,
,
,
,
,
·
0 min read
,
,
,
,
,
,
,
·
0 min read
Florian Pouthier
Sylvain Durand
Nicolas Marchand
Jonathan Dumon
Abdoullah Ndoye
Amaury Negre
Pierre Susbielle
Jose J. Castillo-Zamora
J. Fermi Guerrero Castellanos
Franck Ruffier
Abstract
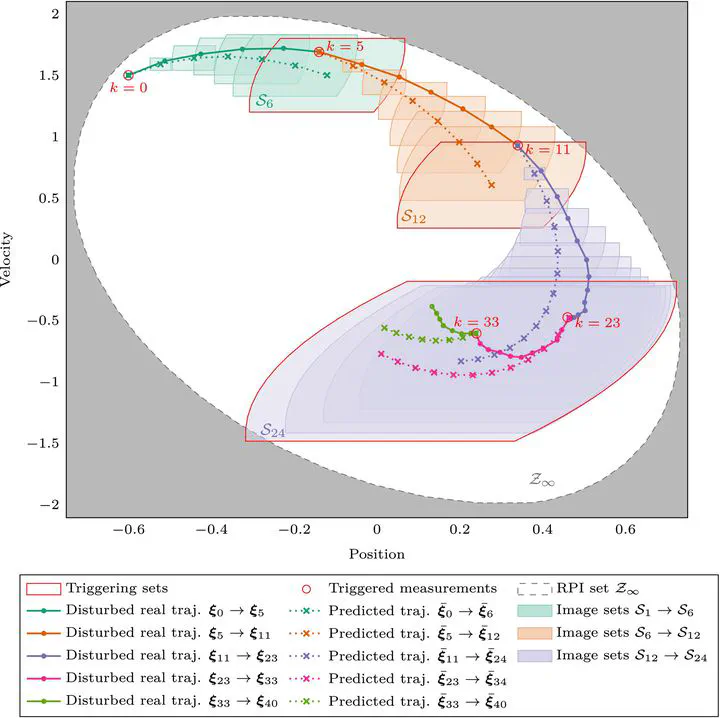
This article introduces a novel self-triggering strategy designed to ensure the control of discrete-time linear systems with guaranteed stability, even in the presence of disturbances and uncertainties. This strategy aims to consistently maintain satisfaction of state constraints while accounting for the uncertainties in the system through a set-membership description. The self-triggering framework primarily relies on reachable and invariant sets. Reachable sets quantify the maximum deviation of the disturbed system from the predicted behavior, while an invariant set establishes triggering bounds for these reachable sets. This control method is intended to minimize the number of measurements required, thereby avoiding network bandwidth saturation. To validate the effectiveness of the proposed strategy, the experiments are conducted on an air extractor system, demonstrating a reduction in the number of measurement samples while ensuring stability and satisfying system state constraints.
Type
Publication
International Journal of Robust and Nonlinear Control